Summary
Olive Robotics GmbH introduces ROS on Module, known as EdgeROS™, as a groundbreaking approach that embeds the advanced capabilities of Robot Operating System 2 (ROS 2) and Data Distribution Service (DDS) within compact, powerful System on Modules (SoMs). This white paper delves into the scientific and technical aspects of ROS on Module, exploring its transformative potential in robotic system integration, enhanced sensor and motor control capabilities, and its role in enabling sophisticated, adaptable, and efficient robotic solutions.
1. Introduction
In the ever-evolving landscape of robotics, the need for more integrated, efficient, and adaptable systems is paramount. Olive Robotics GmbH's ROS on Module, known as EdgeROS™, represents a significant leap forward, integrating ROS 2's computational and communication capabilities directly into hardware modules. This innovation promises to reshape how robotic systems are designed, implemented, and scaled.
2. Foundation of ROS on Module
ROS 2: A Cutting-Edge Framework for Modern Robotics
ROS 2 stands as a beacon of modern robotics frameworks, building upon the legacy of the original Robot Operating System (ROS). Engineered with a focus on meeting the complex demands of contemporary robotic systems, ROS 2 introduces significant advancements in areas critical to robotic performance and reliability.
- Enhanced Real-Time Processing
One of the cornerstones of ROS 2 is its enhanced support for real-time processing. Unlike its predecessor, ROS 2 caters to the need for deterministic execution times critical in robotic applications like motion control and autonomous navigation. This is achieved through a combination of real-time operating system (RTOS) compatibility, real-time-safe memory management, and deterministic execution of middleware layers.
- Improved Security Protocols
Security in robotic systems, especially those deployed in sensitive or human-interactive environments, is paramount. ROS 2 elevates the security benchmarks with features like authentication, encryption, and access control at the node level. This granular approach to security ensures that each component within a ROS 2 system can be individually secured, mitigating risks of unauthorized access and data breaches.
- Advanced System Reliability and Fault Tolerance
ROS 2 introduces an advanced model of system reliability and fault tolerance. With the adoption of Quality of Service (QoS) settings at the DDS layer, ROS 2 can guarantee the reliability of message delivery and handle network volatility. This feature is critical in ensuring the consistent performance of robotic systems, especially in scenarios with unpredictable network conditions.
- DDS: The Robust Communication Protocol
DDS, or Data Distribution Service, is the chosen communication protocol at the heart of ROS 2. It serves as a middleware that enables efficient, reliable, and scalable data exchange within distributed systems.
- Real-Time Data Exchange
DDS excels in facilitating real-time data exchange, a necessity in robotics for tasks like sensor data aggregation, state estimation, and actuator control. The protocol's efficient handling of large data volumes at high rates ensures minimal latency, an essential factor for real-time responsiveness in robotics.
- Decentralized and Scalable Architecture
The decentralized nature of DDS allows for a scalable architecture, crucial in managing complex robotic systems that may encompass a wide range of sensors, actuators, and processing units. This scalability is bolstered by DDS's dynamic discovery mechanism, which seamlessly integrates new components into the network without the need for manual configuration.
- Data-Centric Publish-Subscribe (DCPS) Model
At the core of DDS is the Data-Centric Publish-Subscribe (DCPS) model, which differs from traditional message-centric approaches. In DCPS, the focus is on the data itself, not just the channels of communication. This approach allows for more efficient data management, enabling systems to subscribe to specific data types or topics, thereby reducing unnecessary data processing and transfer.
- Integration of ROS 2 and DDS in SoMs
The amalgamation of ROS 2 and DDS into System on Modules (SoMs) is a groundbreaking development. This integration encapsulates the sophisticated software capabilities of ROS 2 and the robust communication framework of DDS into compact, powerful hardware modules. These SoMs, armed with ROS 2 and DDS, become self-contained units capable of executing complex robotic tasks with high efficiency and reliability.
- Implications for Modular Robotics
The ROS on Module approach signifies a paradigm shift in modular robotics. By embedding advanced software frameworks and communication protocols directly into the hardware, ROS on Modules enables a level of integration and efficiency previously unattainable. This innovation paves the way for more versatile, intelligent, and adaptable robotic systems, capable of operating in diverse and dynamic environments.
3. Embedding ROS 2 and DDS in System on Modules
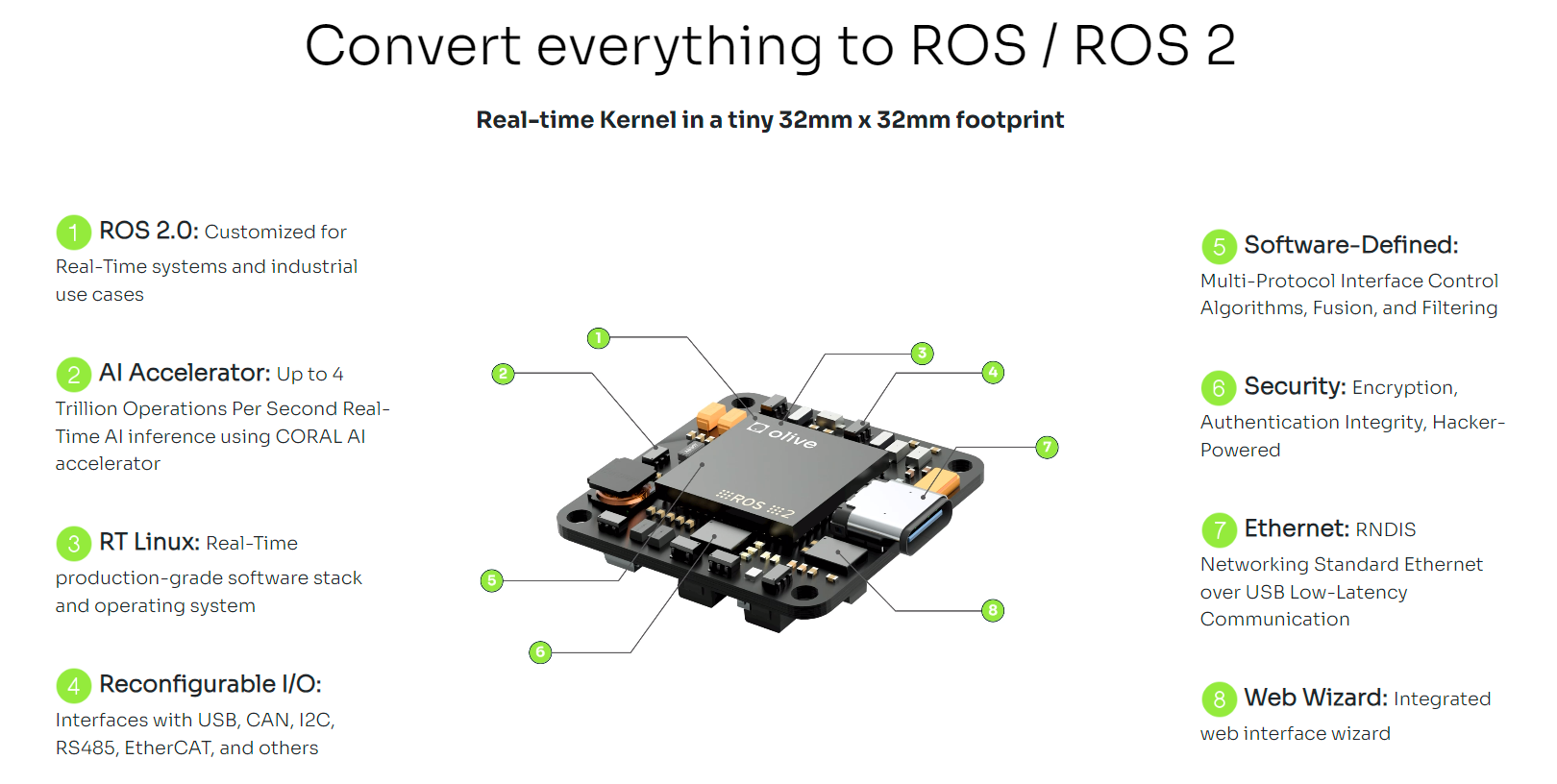
The integration of ROS 2 and DDS into System on Modules (SoMs) by Olive Robotics GmbH represents a technological leap, leveraging advanced techniques and customized solutions to elevate robotic systems. This integration involves embedding a tailored Real-Time Linux kernel within the SoMs, optimized for low-latency and high-throughput operations crucial in robotics. The kernel is fine-tuned to work in tandem with ROS 2, ensuring seamless real-time processing and deterministic task execution. Additionally, the Hardware Abstraction Layer (HAL) is meticulously designed to facilitate direct and efficient communication between the ROS 2 software and the SoM hardware, ensuring that every instruction and data transfer is optimally executed. The inclusion of DDS in this architecture enhances the system's data handling capabilities, leveraging its robust publish-subscribe model for efficient, scalable, and reliable inter-module communication. This sophisticated embedding of ROS 2 and DDS into SoMs, with a focus on advanced HAL and customized RT Linux kernels, underscores Olive Robotics' commitment to pioneering innovative, high-performance solutions in the realm of modular robotics.
4. Advanced Applications and Implications
The advent of ROS on Module technology is set to revolutionize the landscape of robotics, particularly in the realms of Automated Guided Vehicles (AGVs), Autonomous Mobile Robots (AMRs), and service robots. This section delves into how this innovation will shape the future of these robotic applications over the next 5 to 10 years, drawing parallels with academic research and industry trends.
- Transforming AGVs and AMRs
The integration of ROS 2 and DDS within SoMs is poised to drastically enhance the capabilities of AGVs and AMRs. This advancement facilitates more sophisticated navigation algorithms, improved obstacle detection and avoidance, and enhanced operational efficiency. The future will see AGVs and AMRs with unprecedented levels of autonomy, capable of navigating complex environments with minimal human intervention. This evolution is driven by the real-time processing and data handling capabilities of ROS on Module, enabling these vehicles to make split-second decisions based on a myriad of sensor inputs.
- Enhanced Navigation and Efficiency
In the coming years, the navigation systems of AGVs and AMRs will become more refined, leveraging advanced sensor fusion techniques enabled by ROS on Module. This will allow for more accurate mapping, efficient path planning, and robust adaptability to dynamic environments. The integration of high-fidelity sensors, along with sophisticated data processing capabilities, will enable these robots to operate in previously challenging or inaccessible areas.
- Scalability and Adaptability
The modular nature of ROS on Module facilitates the scalability of AGV and AMR fleets. As the needs of a facility or operation grow, additional units can be seamlessly integrated, communicating effectively within the established network. This scalability is not just in numbers but also in capabilities, where updates and enhancements can be rolled out across the fleet with minimal downtime.
- Service Robots: The Next Frontier
Service robots, designed to assist humans in various tasks, will witness significant advancements with ROS on Module technology. These robots will become more interactive, intelligent, and capable of performing complex tasks autonomously.
- Human-Robot Interaction (HRI)
Future service robots will exhibit enhanced HRI capabilities, with ROS on Module enabling more natural and intuitive interactions. This will be achieved through the integration of advanced AI algorithms for speech and gesture recognition, powered by the high computational capabilities of ROS on Module.
- Task Versatility
Service robots will become more versatile, capable of performing a wide range of tasks from domestic chores to assisting in healthcare settings. This versatility is underpinned by the modular design of ROS on Module, allowing for easy customization and reconfiguration based on specific task requirements.
- Looking Ahead: The Next 10 Years
The next decade will witness a significant transformation in robotic capabilities, driven by the advancements in ROS on Module. AGVs and AMRs will become more autonomous and efficient, playing a pivotal role in industries ranging from logistics to manufacturing. Service robots will become an integral part of everyday life, assisting in tasks that range from mundane to highly specialized. The integration of ROS 2 and DDS in SoMs will be a key factor in this robotic evolution, providing the necessary computational power and communication capabilities to turn these visions into reality. As these technologies continue to mature and synergize, the boundaries of what robots can achieve will expand, heralding a new era of robotic innovation and application.
5. Addressing Technical Challenges
The implementation of ROS on Module technology, while groundbreaking, presents several technical challenges that Olive Robotics GmbH is actively addressing. Key among these is managing latency, where ROS 2 and DDS on SoMs must maintain response times below 10 milliseconds for real-time applications, a threshold crucial for tasks such as precision manipulation in robotics. To achieve this, advanced optimization of the Real-Time Linux kernel and careful tuning of the DDS Quality of Service settings are employed, ensuring efficient data prioritization and minimal delay in communication. Another significant challenge is ensuring interoperability across various hardware and software platforms. This involves conforming to stringent industry standards like ISO 10218 for robotics safety and adhering to ROS 2’s interface guidelines to maintain compatibility with a wide range of sensors and actuators. Furthermore, bandwidth optimization remains a priority, especially when handling high data throughput scenarios typical in sensor-rich robotic systems, where data rates can exceed 100 Mbps. Solutions include employing advanced data compression techniques and optimizing network protocols to ensure seamless data flow without compromising system performance. By tackling these challenges head-on, Olive Robotics ensures that ROS on Module technology not only meets but exceeds the current and future demands of sophisticated robotic applications.
6. Conclusion
In conclusion, Olive Robotics GmbH's development of ROS on Module, integrating ROS 2 and DDS within System on Modules, marks a significant advancement in the field of robotics. This technology addresses critical needs in the robotics industry, offering enhanced capabilities in real-time processing, reliable communication, and efficient system integration. The advancements in managing latency, maintaining interoperability, and optimizing bandwidth are pivotal in pushing the boundaries of what robotic systems can achieve, particularly in the realms of AGVs, AMRs, and service robots.
Over the next 5 to 10 years, we anticipate ROS on Module to be at the forefront of a robotics revolution. With response times kept below the critical 10 milliseconds threshold, these systems are set to enable more precise, efficient, and adaptable robots. The commitment to meeting international standards and ensuring compatibility across a broad range of hardware and software underscores the technology’s potential for widespread adoption and impact.
As we address the technical challenges inherent in such advanced systems, including optimizing for high data throughput scenarios, we are paving the way for a new era in robotics. This era will be characterized by robots that are not only more autonomous and efficient but also more integrated into our daily lives and industries, reshaping how we interact with and benefit from robotic technology.
In embracing these innovations, Olive Robotics GmbH is committed to staying at the cutting edge of robotics research and development, ensuring that ROS on Module continues to evolve and meet the ever-growing and changing demands of the field. This commitment positions us not just as participants but as leaders in the future of robotics, driving the industry towards new horizons of possibility and achievement.
Author Information
Mojtaba "Leox" Karimi, Ph.D.
CEO & Founder, Olive Robotics GmbH
karimi@olive-robotics.com